Robotic manipulator designed for tray manipulation in the Tire Manufacturing Industry
Summary:
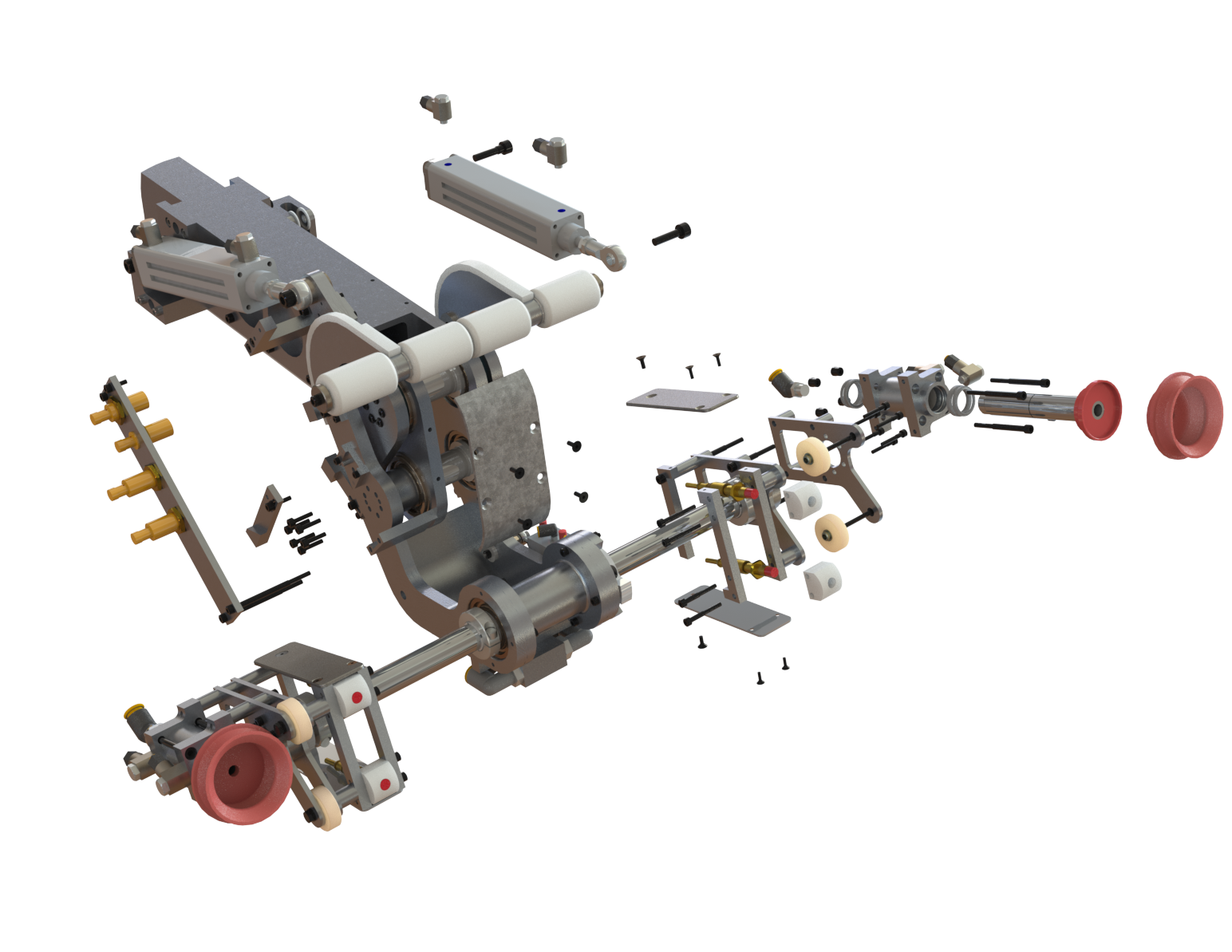
High performance, multi-function gripper end effector for the Tire Manufacturing Industry.
Details:
| Industry: | Tire Manufacturing |
| Technology: | Pneumatics/Vacuum |
| Cycle Rate: | 1.5 sec. |
This gripper combined two functions using both a pressure sensitive clamping device and a high power vacuum mechanism. The low profile design allows the robot end-effector better access to its target. The degrees of freedom were carefully controlled to ensure adequate compliance with sufficient stability. Pneumatic solenoids were remotely located, on the manipulator, to enhance responsiveness.